Lagebeziehungen Von Geraden Im Raum
Im dreidimensionalen Raum können zwei Geraden unterschiedliche Beziehungen zueinander haben. Diese Beziehungen zu verstehen, ist fundamental in vielen Bereichen, von der Architektur über die Ingenieurwissenschaften bis hin zur Computergrafik. Dieser Artikel erläutert die verschiedenen Lagebeziehungen von Geraden im Raum, erklärt die Kriterien zur Unterscheidung und zeigt, wie man diese Beziehungen rechnerisch bestimmt.
Grundlegende Lagebeziehungen
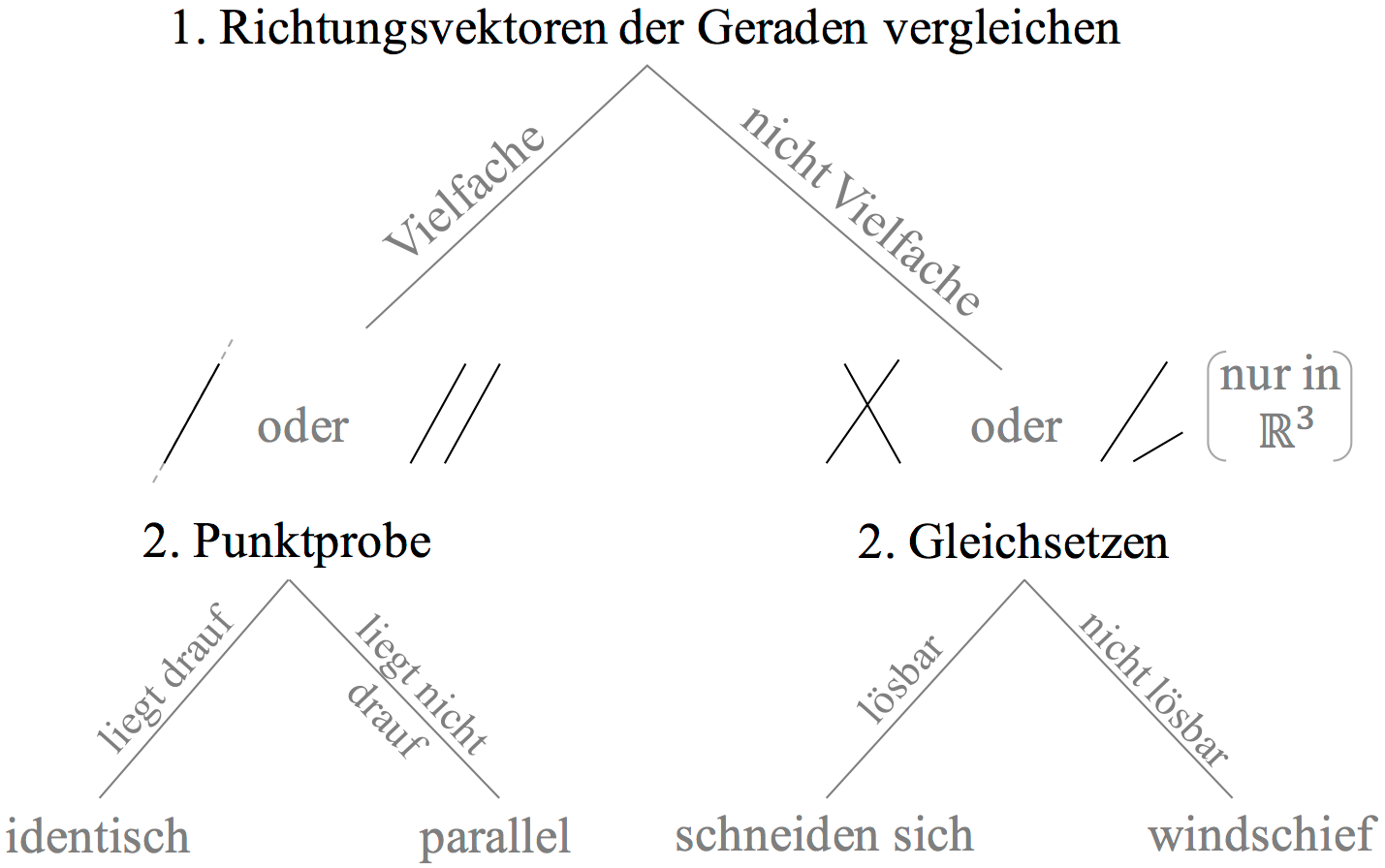
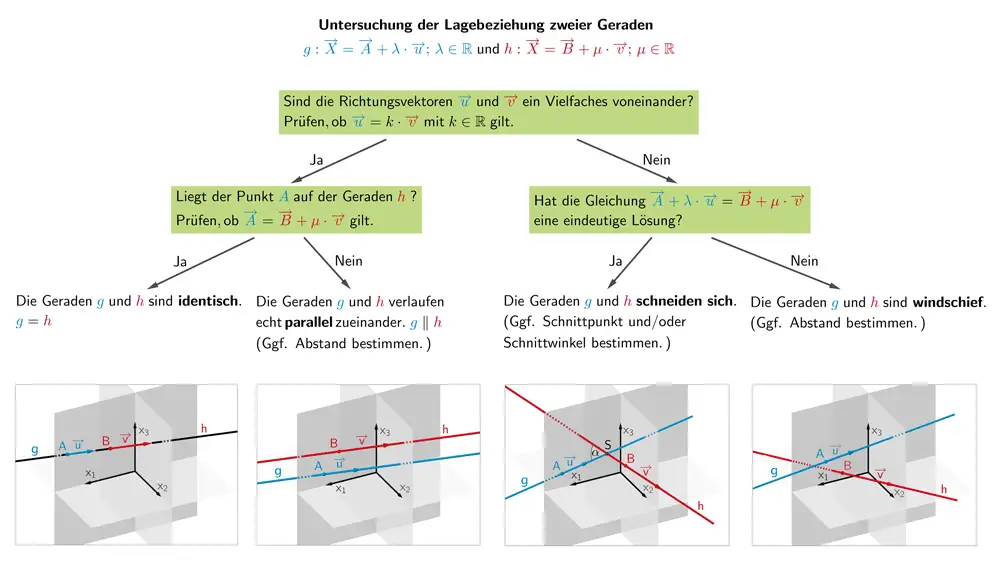
Es gibt vier Hauptkategorien, in die sich die Lagebeziehungen von zwei Geraden im Raum einteilen lassen:
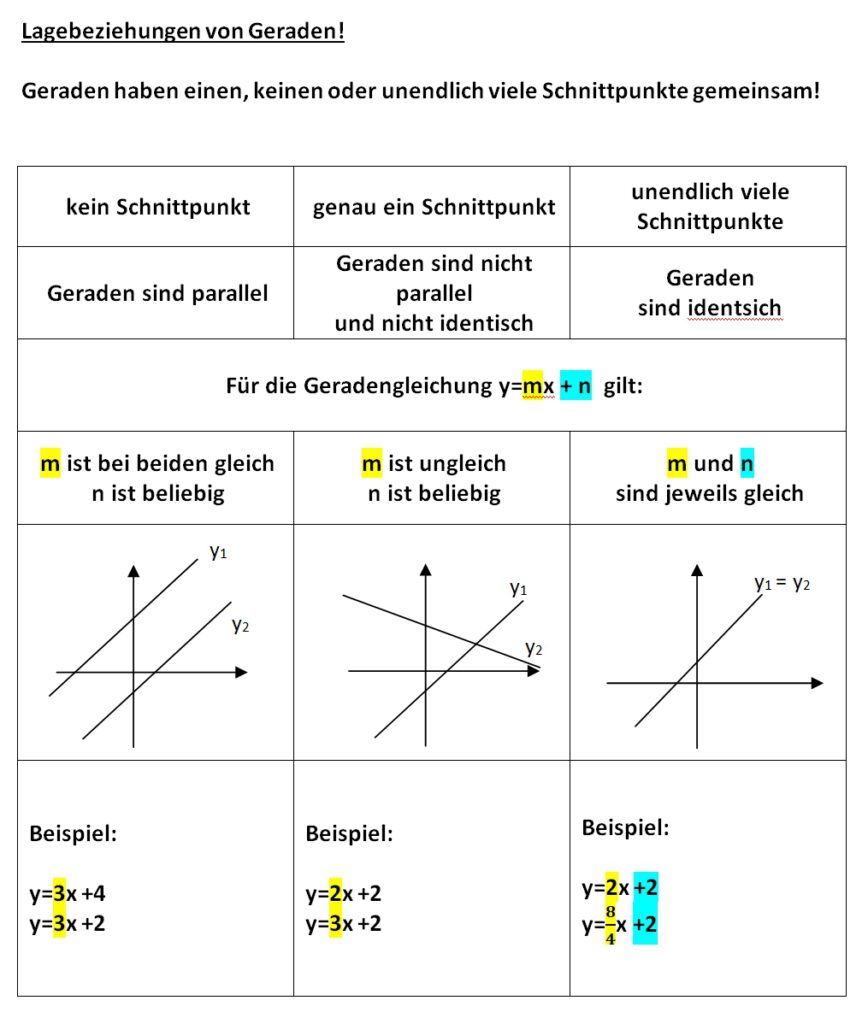
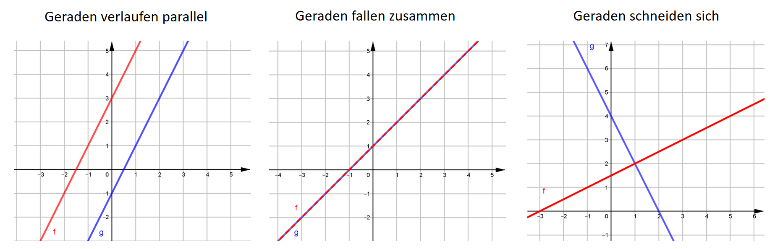
- Identische Geraden: Die Geraden sind exakt gleich. Jeder Punkt auf der einen Geraden liegt auch auf der anderen Geraden, und umgekehrt.
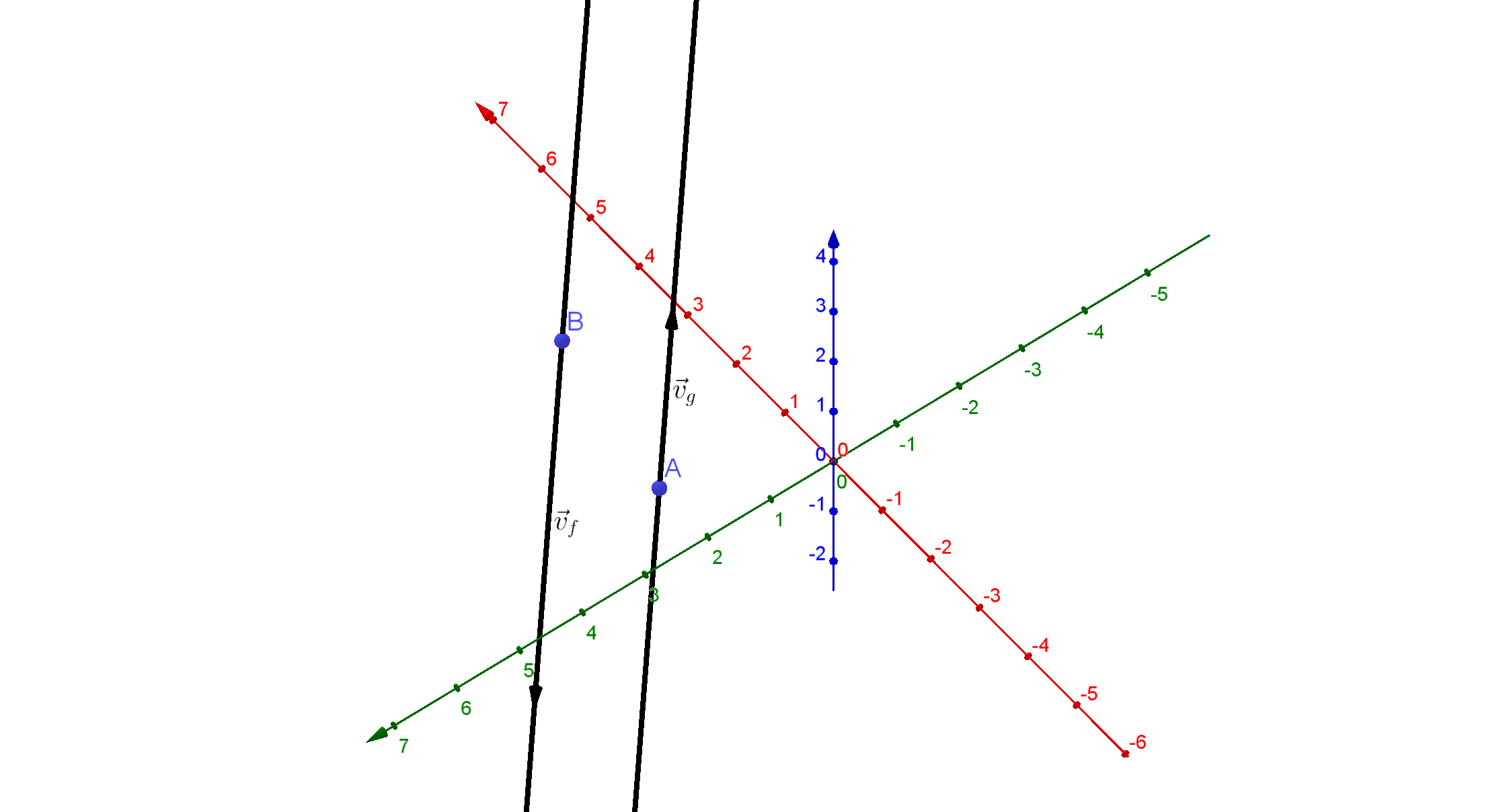
- Parallele Geraden: Die Geraden verlaufen in die gleiche Richtung und haben keinen gemeinsamen Punkt. Sie liegen in einer Ebene.
- Sich schneidende Geraden: Die Geraden haben genau einen gemeinsamen Punkt, den Schnittpunkt. Sie liegen ebenfalls in einer Ebene.
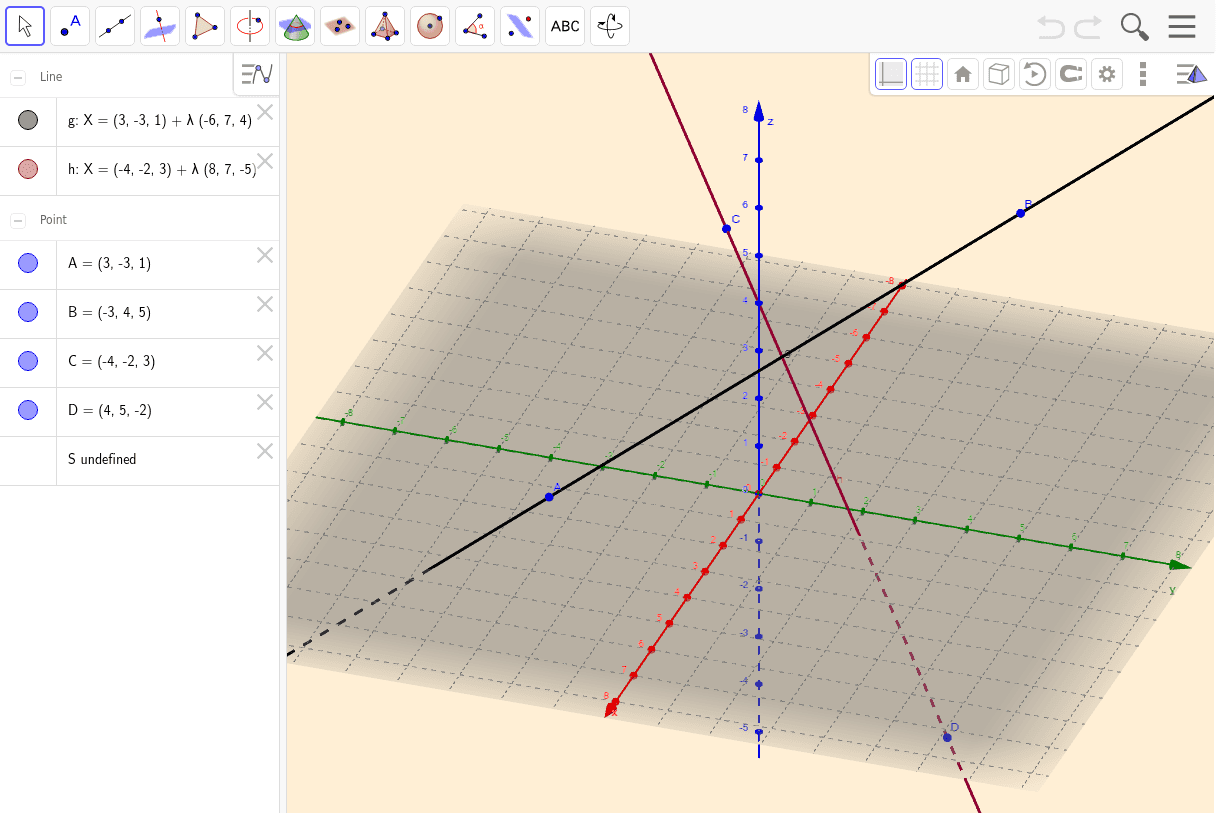
- Windschiefe Geraden: Die Geraden verlaufen nicht parallel und schneiden sich nicht. Sie liegen auch nicht in derselben Ebene. Diese Beziehung ist charakteristisch für den dreidimensionalen Raum.
Rechnerische Bestimmung der Lagebeziehung
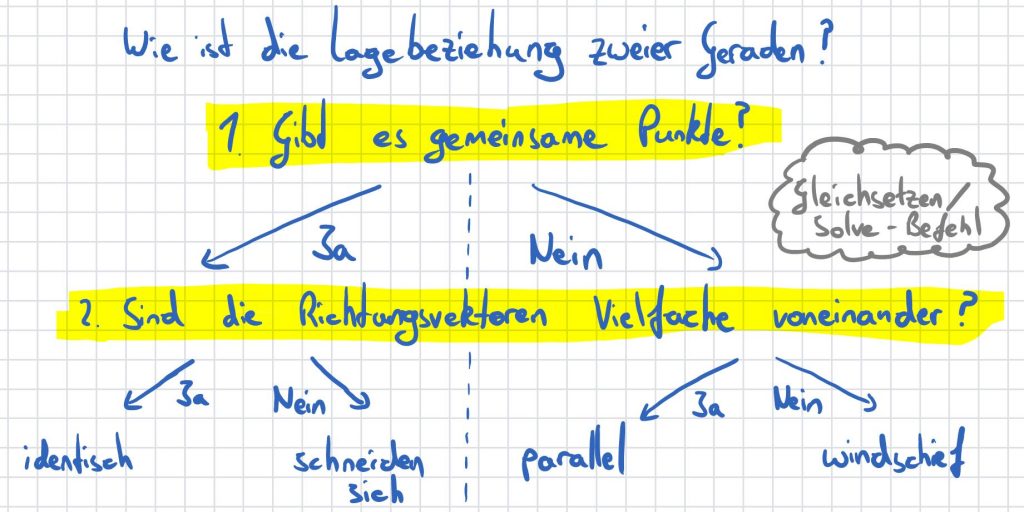
Um die Lagebeziehung zweier Geraden rechnerisch zu bestimmen, geht man in der Regel wie folgt vor:
1. Darstellung der Geraden
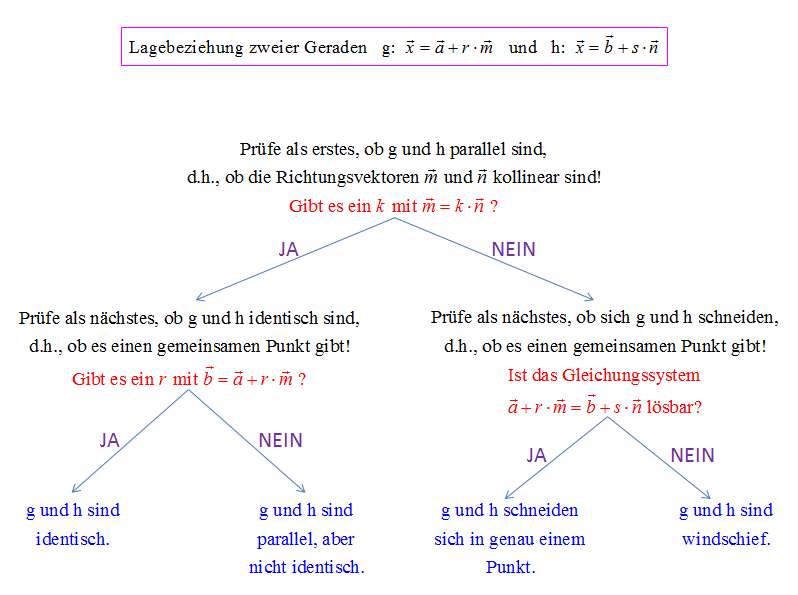
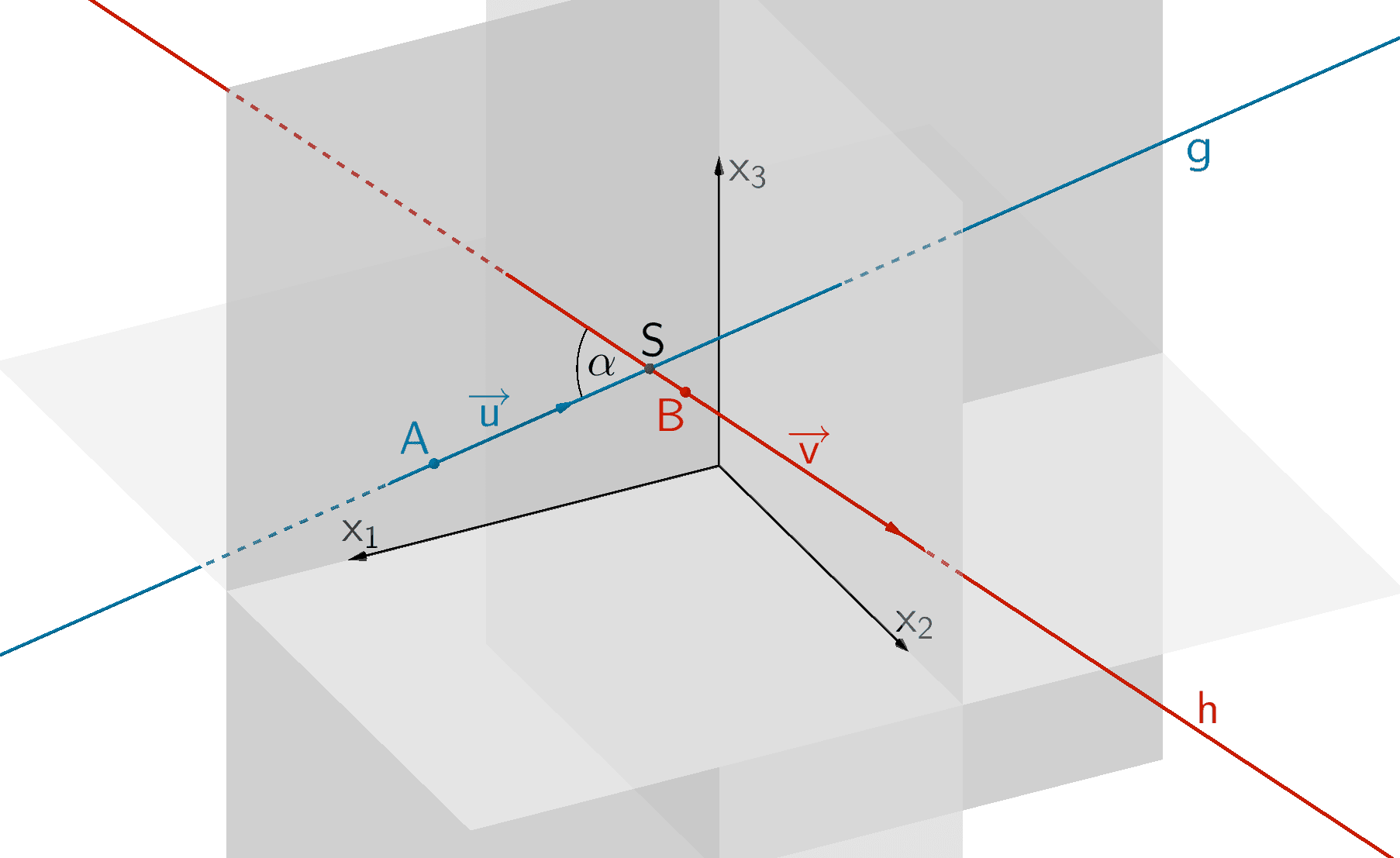
Zunächst müssen die Geraden in einer geeigneten Form dargestellt werden. Üblicherweise verwendet man die Parameterform:
g: ⃗x = ⃗a + λ * ⃗u
h: ⃗x = ⃗b + μ * ⃗v
Dabei sind:
- ⃗x ein allgemeiner Punkt auf der Geraden
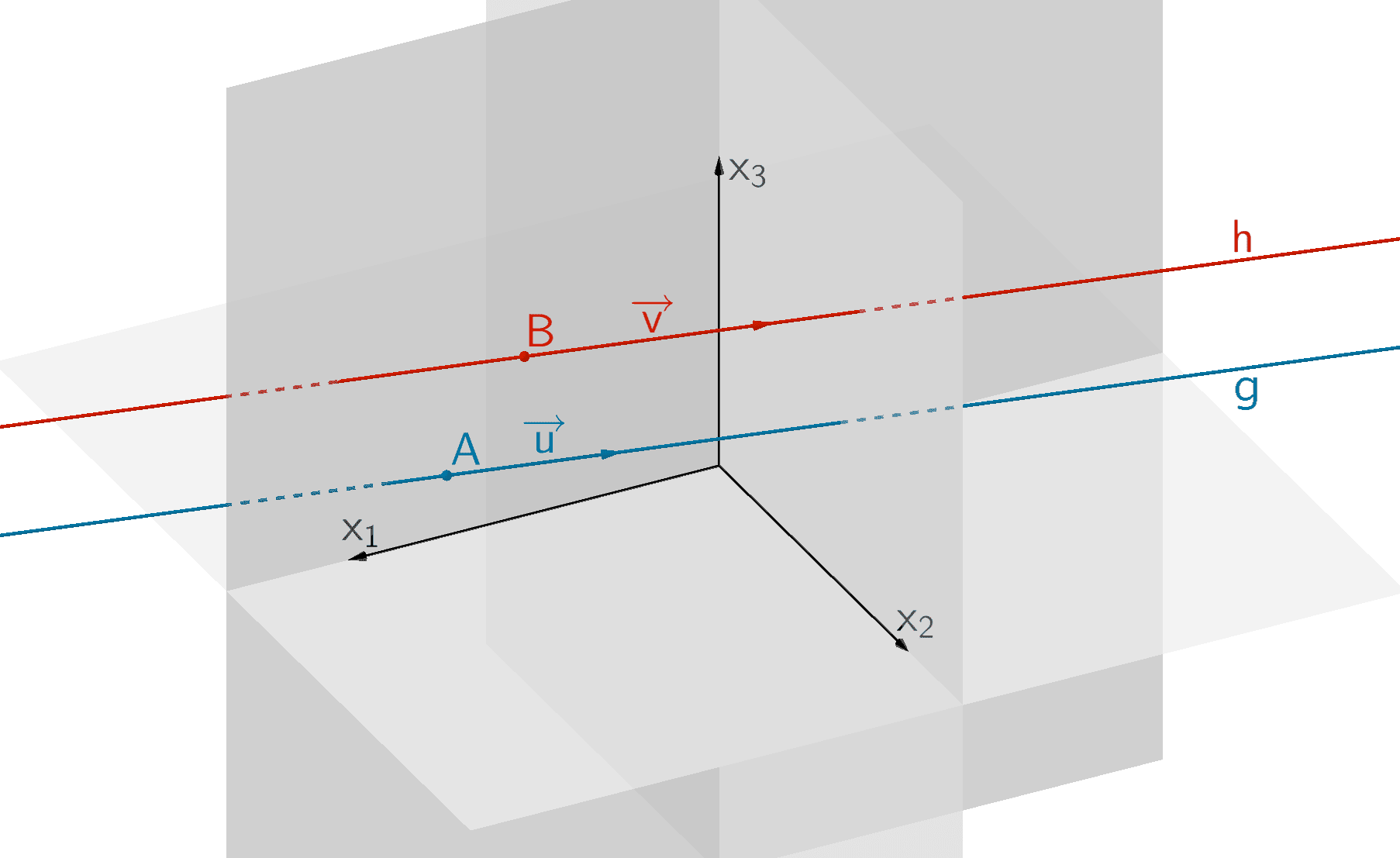
- ⃗a und ⃗b die Stützvektoren der Geraden g bzw. h. Sie geben einen Punkt an, der auf der jeweiligen Geraden liegt.
- ⃗u und ⃗v die Richtungsvektoren der Geraden g bzw. h. Sie geben die Richtung an, in die die Gerade verläuft.
- λ (Lambda) und μ (Mü) Parameter, die alle reellen Zahlen annehmen können. Durch Variation dieser Parameter erhält man alle Punkte auf der Geraden.
2. Überprüfung auf Parallelität oder Identität
Der erste Schritt ist die Überprüfung, ob die Richtungsvektoren ⃗u und ⃗v linear abhängig sind. Das bedeutet, dass ein Vielfaches des einen Vektors gleich dem anderen Vektor ist. Mathematisch ausgedrückt:
⃗u = k * ⃗v
wobei k eine reelle Zahl ist.
Wenn diese Bedingung erfüllt ist, sind die Geraden entweder parallel oder identisch. Um zu entscheiden, welche der beiden Fälle vorliegt, prüft man, ob der Stützvektor ⃗a der Geraden g auch auf der Geraden h liegt (oder umgekehrt). Das bedeutet, man setzt ⃗a in die Gleichung von h ein und prüft, ob es einen Wert für μ gibt, der die Gleichung erfüllt:
⃗a = ⃗b + μ * ⃗v
Wenn man ein solches μ findet, liegt ⃗a auf h und die Geraden sind identisch. Wenn es kein solches μ gibt, sind die Geraden parallel.
3. Überprüfung auf Schnittpunkt
Wenn die Richtungsvektoren ⃗u und ⃗v nicht linear abhängig sind, können die Geraden sich schneiden oder windschief sein. Um zu überprüfen, ob sie sich schneiden, setzt man die beiden Geradengleichungen gleich:
⃗a + λ * ⃗u = ⃗b + μ * ⃗v
Dies führt zu einem linearen Gleichungssystem mit drei Gleichungen (für die x-, y- und z-Koordinaten) und zwei Unbekannten (λ und μ). Man löst dieses Gleichungssystem. Wenn es eine eindeutige Lösung für λ und μ gibt, existiert ein Schnittpunkt. Um die Koordinaten des Schnittpunkts zu finden, setzt man den gefundenen Wert für λ in die Gleichung von g (oder den Wert für μ in die Gleichung von h) ein.
4. Überprüfung auf Windschiefe
Wenn das lineare Gleichungssystem aus Schritt 3 keine Lösung hat, sind die Geraden windschief. Das bedeutet, sie sind nicht parallel und schneiden sich nicht.
Zusammenfassung der Vorgehensweise
- Darstellung: Geraden in Parameterform darstellen.
- Parallelität/Identität: Prüfen, ob die Richtungsvektoren linear abhängig sind (⃗u = k * ⃗v).
- Wenn ja: Prüfen, ob ein Stützvektor der einen Geraden auf der anderen Geraden liegt. Wenn ja: identisch. Wenn nein: parallel.
- Schnittpunkt: Wenn die Richtungsvektoren nicht linear abhängig sind, die Geradengleichungen gleichsetzen und das resultierende lineare Gleichungssystem lösen.
- Wenn es eine eindeutige Lösung gibt: Schnittpunkt.
- Wenn es keine Lösung gibt: windschief.
Beispiel
Gegeben seien die Geraden:
g: ⃗x = (1, 2, 3) + λ * (1, 0, 1)
h: ⃗x = (0, 1, 1) + μ * (2, 0, 2)
- Darstellung: Die Geraden sind bereits in Parameterform gegeben.
- Parallelität/Identität: Der Richtungsvektor von h ist das Doppelte des Richtungsvektors von g: (2, 0, 2) = 2 * (1, 0, 1). Die Geraden sind also parallel oder identisch.
Wir prüfen, ob der Punkt (1, 2, 3) auf der Geraden h liegt: (1, 2, 3) = (0, 1, 1) + μ * (2, 0, 2)
Dies führt zu dem Gleichungssystem:- 1 = 0 + 2μ => μ = 0.5
- 2 = 1 + 0μ => 2 = 1 (Widerspruch!)
- 3 = 1 + 2μ => μ = 1
Bedeutung der Lagebeziehungen
Das Verständnis der Lagebeziehungen von Geraden im Raum ist in vielen praktischen Anwendungen entscheidend. In der Architektur beispielsweise hilft es, die Stabilität von Konstruktionen zu gewährleisten. In der Robotik ermöglicht es die Planung von Bewegungsabläufen. In der Computergrafik ist es unerlässlich für die realistische Darstellung von Objekten und Szenen.
Die genaue Bestimmung der Lagebeziehungen trägt somit maßgeblich zur Präzision und Funktionalität in verschiedensten Disziplinen bei.
Hinweis zur Software
Viele Softwarepakete für Mathematik und CAD (Computer-Aided Design) bieten Funktionen zur Bestimmung der Lagebeziehungen von Geraden im Raum. Diese Tools können die Berechnungen erheblich vereinfachen, insbesondere bei komplexen geometrischen Konfigurationen. Die manuelle Berechnung, wie oben beschrieben, ist jedoch wichtig, um das grundlegende Verständnis der Konzepte zu gewährleisten.