Ordinary Differential Equations Second Order

In der Mathematik, insbesondere in der Welt der Differentialgleichungen, spielen gewöhnliche Differentialgleichungen zweiter Ordnung (oft abgekürzt als ODEs zweiter Ordnung) eine fundamentale Rolle. Sie sind mächtige Werkzeuge zur Modellierung einer Vielzahl von Phänomenen in Naturwissenschaften, Ingenieurwesen und Wirtschaft. Dieser Artikel bietet eine klare und verständliche Einführung in das Thema.
Was sind gewöhnliche Differentialgleichungen zweiter Ordnung?
Eine gewöhnliche Differentialgleichung (ODE) ist eine Gleichung, die eine Funktion mit ihren Ableitungen in Beziehung setzt. Das Adjektiv "gewöhnlich" bedeutet, dass die Funktion nur von einer einzigen unabhängigen Variablen abhängt (im Gegensatz zu partiellen Differentialgleichungen, die Funktionen mehrerer Variablen behandeln). Die "zweiter Ordnung" gibt an, dass die höchste Ableitung, die in der Gleichung vorkommt, die zweite Ableitung der Funktion ist.
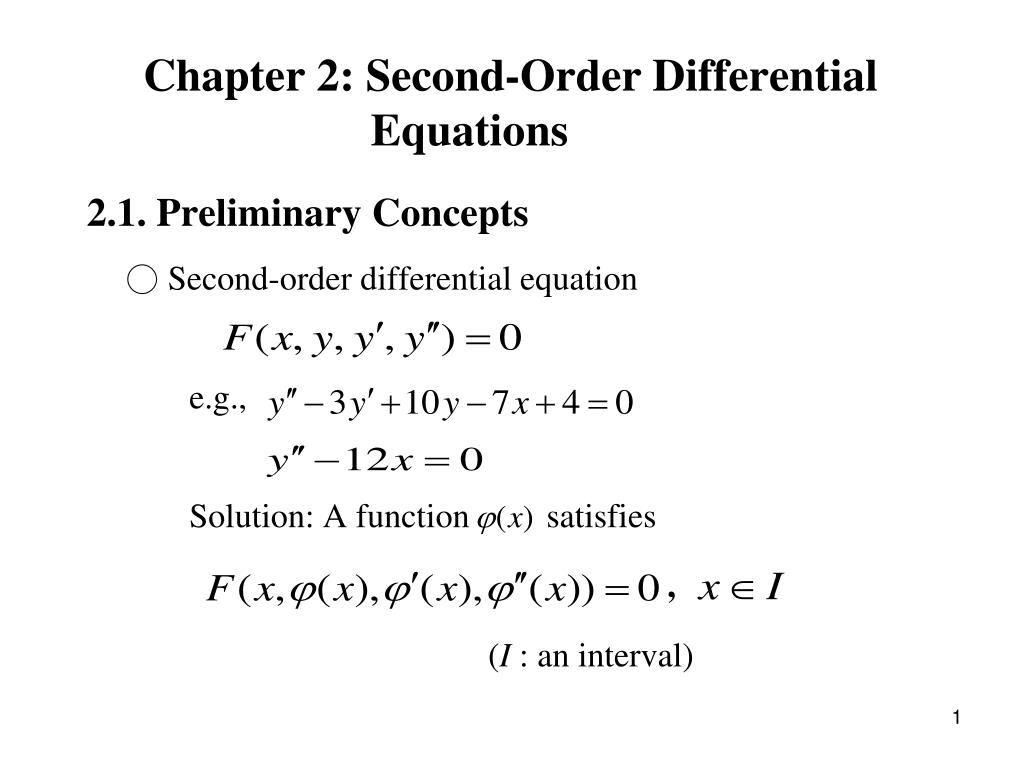
Formal lässt sich eine allgemeine gewöhnliche Differentialgleichung zweiter Ordnung wie folgt darstellen:
F(x, y, y', y'') = 0
Hierbei:
- x ist die unabhängige Variable.
- y = y(x) ist die abhängige Variable oder die Funktion, die wir suchen.
- y' = dy/dx ist die erste Ableitung von y nach x.
- y'' = d2y/dx2 ist die zweite Ableitung von y nach x.
- F ist eine Funktion, die all diese Variablen miteinander verbindet.
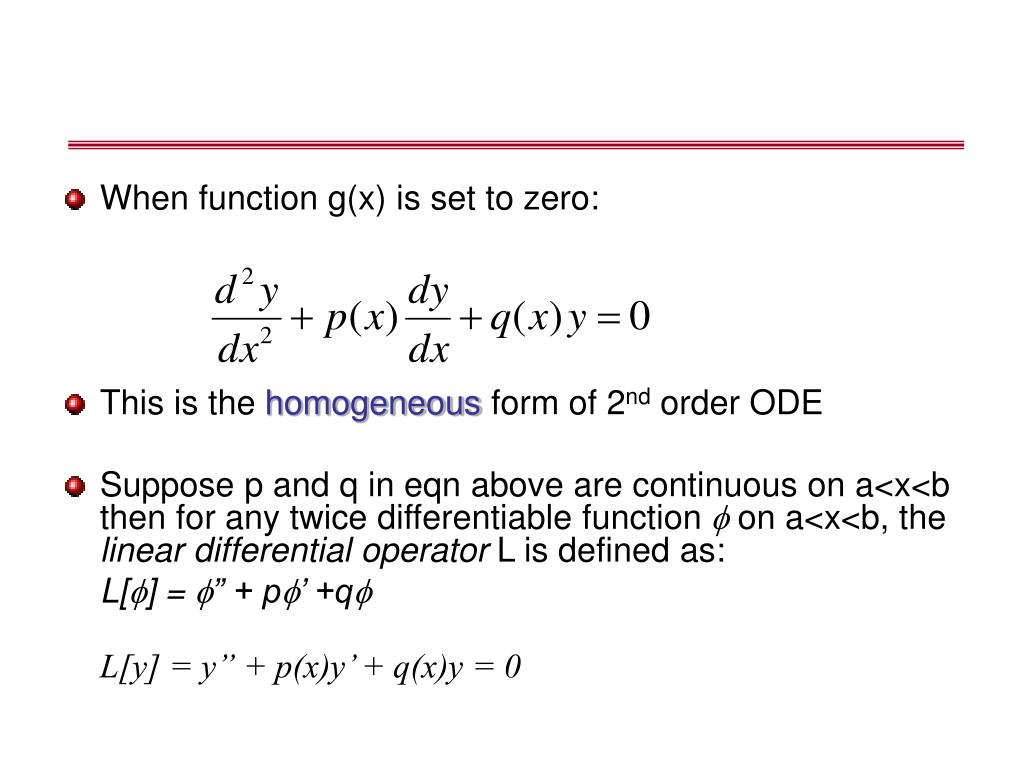
Eine lineare gewöhnliche Differentialgleichung zweiter Ordnung hat die spezifischere Form:
a(x)y'' + b(x)y' + c(x)y = f(x)
Hierbei:
- a(x), b(x), c(x) und f(x) sind Funktionen von x.
- a(x) ist der Koeffizient der zweiten Ableitung, b(x) der der ersten Ableitung, und c(x) der der Funktion selbst.
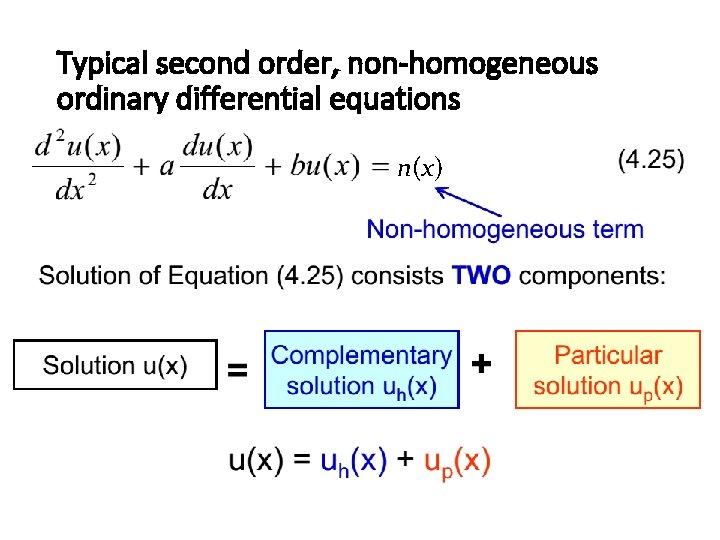
- f(x) ist die Quellenfunktion oder Inhomogenität. Wenn f(x) = 0, dann ist die Gleichung homogen.
Warum sind sie wichtig?
Gewöhnliche Differentialgleichungen zweiter Ordnung sind unglaublich vielseitig und finden Anwendung in vielen Bereichen:
- Physik: Sie beschreiben die Bewegung von Objekten (z.B. gedämpfte Schwingungen, erzwungene Schwingungen, Projektilbewegung), elektrische Schaltkreise (z.B. Reihen-RLC-Schaltkreise) und Wellenphänomene.
- Ingenieurwesen: Sie werden verwendet, um die Stabilität von Strukturen, die Auslenkung von Balken und die Dynamik von Kontrollsystemen zu modellieren.
- Biologie: Sie können Populationswachstum, die Ausbreitung von Krankheiten und die Dynamik chemischer Reaktionen beschreiben.
- Wirtschaft: Sie werden zur Modellierung von Finanzmärkten und Wirtschaftswachstum eingesetzt.
Methoden zur Lösung
Die Lösung einer ODE zweiter Ordnung bedeutet, die Funktion y(x) zu finden, die die Gleichung erfüllt. Es gibt verschiedene Methoden, um solche Gleichungen zu lösen, abhängig von ihrer Form und Eigenschaften:
1. Analytische Methoden
Diese Methoden zielen darauf ab, eine explizite Formel für die Lösung zu finden. Einige gängige Techniken sind:
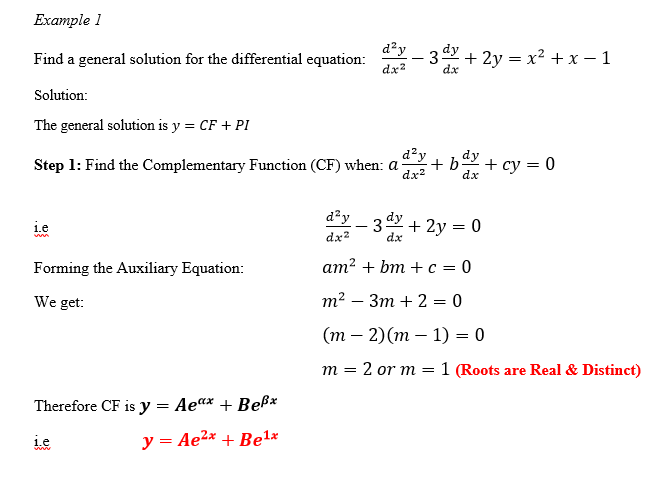
- Konstante Koeffizienten: Für lineare homogene Gleichungen mit konstanten Koeffizienten (a, b, c sind Konstanten) verwendet man den charakteristischen Gleichungsansatz. Man setzt y = erx und erhält eine quadratische Gleichung für r. Die Wurzeln dieser Gleichung bestimmen die Form der Lösung.
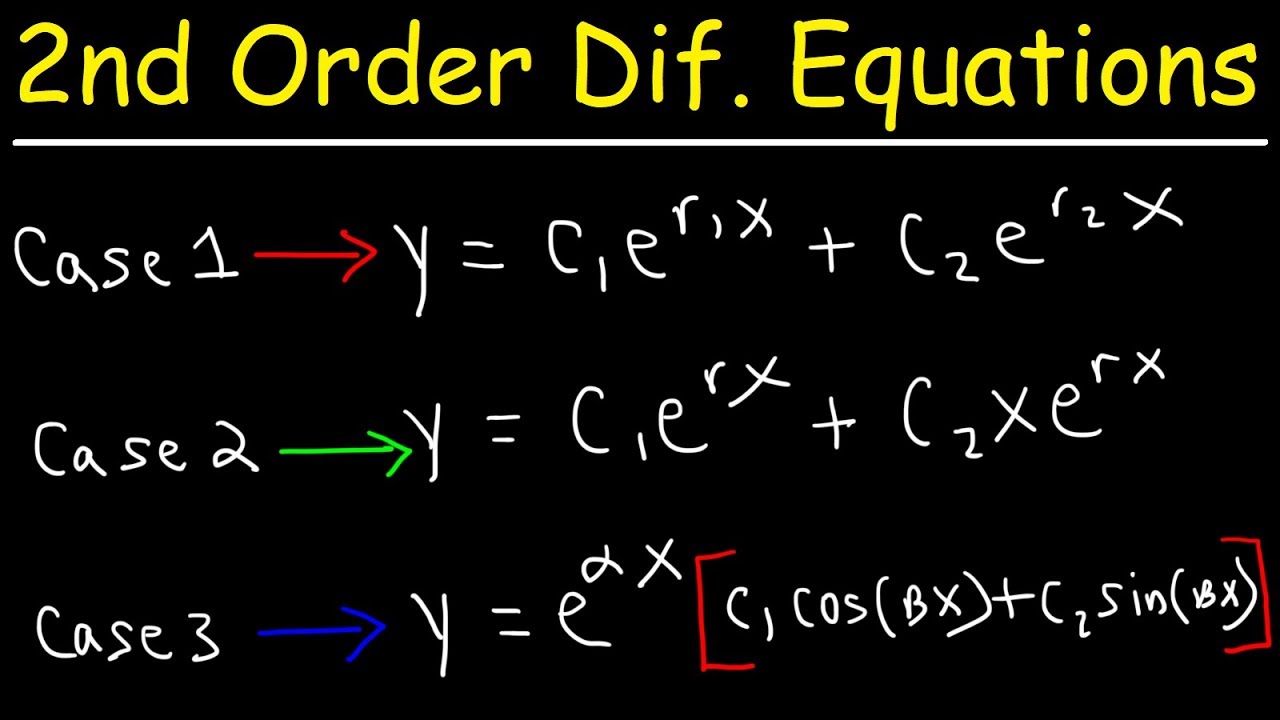
Wenn die Wurzeln r1 und r2:
- Reell und unterschiedlich sind: y(x) = C1er1x + C2er2x
- Reell und gleich sind: y(x) = (C1 + C2x)erx
- Komplex konjugiert sind (r = α ± iβ): y(x) = eαx(C1cos(βx) + C2sin(βx))
C1 und C2 sind Integrationskonstanten, die durch Anfangsbedingungen bestimmt werden.
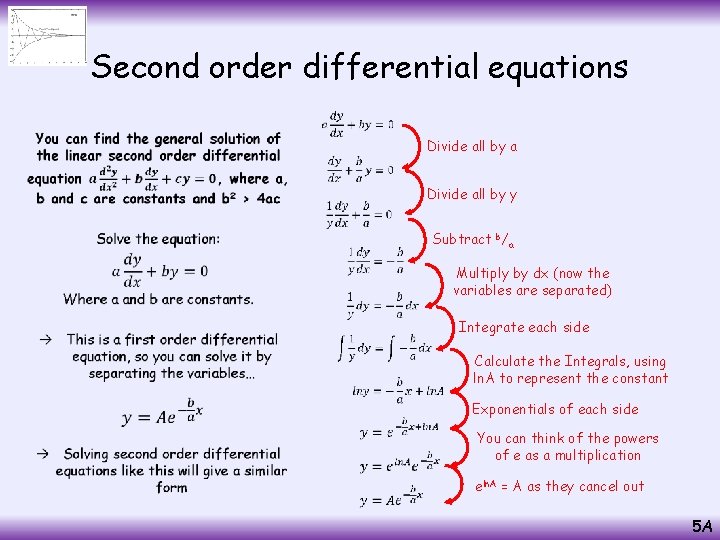
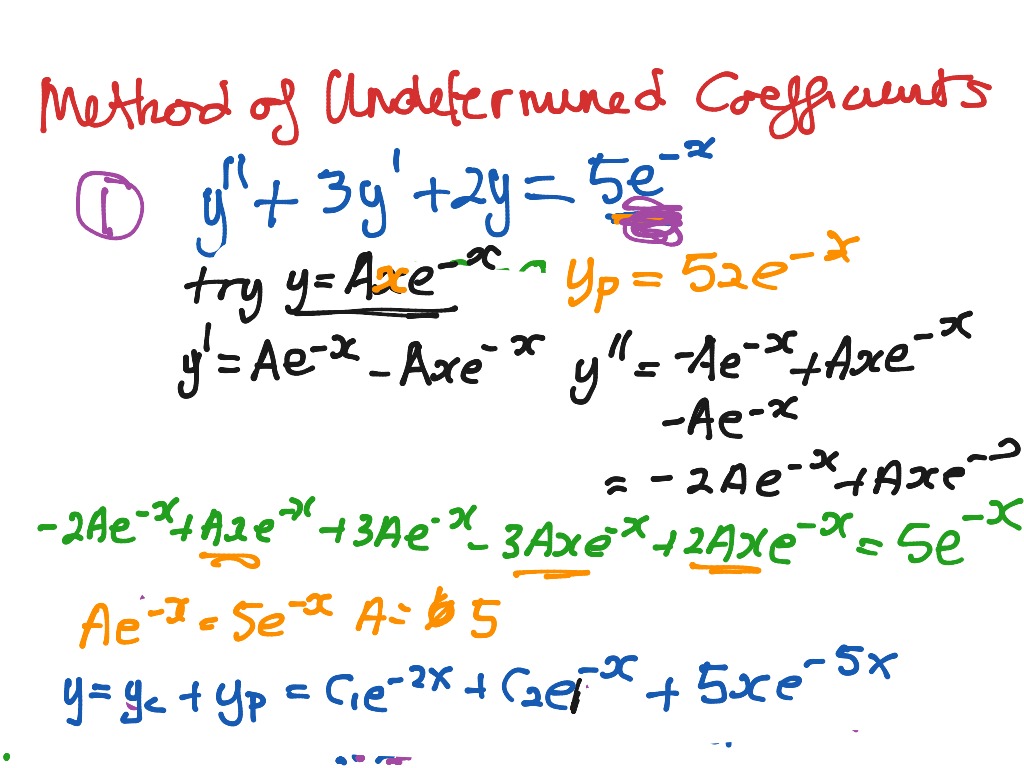
- Variation der Konstanten: Diese Methode wird verwendet, um die allgemeine Lösung einer inhomogenen linearen Gleichung zu finden, wenn man die allgemeine Lösung der zugehörigen homogenen Gleichung kennt. Sie beinhaltet das Ersetzen der Konstanten in der homogenen Lösung durch Funktionen von x.
- Reduktion der Ordnung: Wenn eine Lösung y1(x) einer linearen homogenen ODE zweiter Ordnung bekannt ist, kann diese Methode verwendet werden, um eine zweite, linear unabhängige Lösung y2(x) zu finden.
- Potenzreihenansatz: Diese Methode ist nützlich, wenn die Koeffizienten der Gleichung keine Konstanten sind und keine einfachen elementaren Funktionen als Lösungen erwartet werden. Man setzt y(x) als eine Potenzreihe an und bestimmt die Koeffizienten der Reihe.
2. Numerische Methoden
Wenn keine analytische Lösung gefunden werden kann (was oft der Fall ist), können numerische Methoden verwendet werden, um eine approximative Lösung zu erhalten. Diese Methoden erzeugen eine Reihe von Werten, die die Lösung an diskreten Punkten approximieren.
- Euler-Verfahren: Ein einfaches, aber oft ungenaues Verfahren, das die Ableitungen durch Differenzenquotienten approximiert.
- Runge-Kutta-Verfahren: Eine Familie von Verfahren höherer Ordnung, die genauere Approximationen liefern. Das Runge-Kutta-Verfahren 4. Ordnung ist besonders beliebt.
- Finite-Differenzen-Methode: Diese Methode diskretisiert den Definitionsbereich der Funktion und approximiert die Ableitungen durch Differenzenquotienten an den Gitterpunkten. Dies führt zu einem System algebraischer Gleichungen, das gelöst werden kann.
Anfangs- und Randwertprobleme
Um eine eindeutige Lösung für eine ODE zweiter Ordnung zu erhalten, benötigt man zusätzliche Informationen. Diese Informationen kommen in Form von Anfangsbedingungen oder Randbedingungen.
- Anfangswertproblem (AWP): Ein AWP besteht aus der Differentialgleichung zusammen mit den Werten der Funktion und ihrer ersten Ableitung an einem bestimmten Punkt, z.B. y(x0) = y0 und y'(x0) = y'0. Diese Bedingungen spezifizieren den "Anfangszustand" des Systems.
- Randwertproblem (RWP): Ein RWP besteht aus der Differentialgleichung zusammen mit den Werten der Funktion an zwei verschiedenen Punkten, z.B. y(x1) = y1 und y(x2) = y2. Diese Bedingungen spezifizieren das Verhalten der Funktion an den "Rändern" des Intervalls.
Die Existenz und Eindeutigkeit von Lösungen für AWP und RWP sind wichtige Fragestellungen, die von verschiedenen mathematischen Sätzen behandelt werden. Die Art des Problems (AWP oder RWP) beeinflusst die geeigneten Lösungsmethoden.
Beispiel: Gedämpfte Schwingung
Ein klassisches Beispiel für eine ODE zweiter Ordnung ist die Gleichung für eine gedämpfte Schwingung:
my'' + cy' + ky = 0
Hierbei:
- m ist die Masse.
- c ist der Dämpfungskoeffizient.
- k ist die Federkonstante.
Die Natur der Lösung hängt vom Verhältnis zwischen Dämpfung und Schwingungsfrequenz ab:
- Unterdämpfung: (c2 < 4mk) Die Lösung ist eine oszillierende Funktion mit exponentiell abnehmender Amplitude.
- Kritische Dämpfung: (c2 = 4mk) Die Lösung kehrt am schnellsten ohne Schwingung zum Gleichgewicht zurück.
- Überdämpfung: (c2 > 4mk) Die Lösung kehrt langsam ohne Schwingung zum Gleichgewicht zurück.
Dieses Beispiel illustriert, wie ODEs zweiter Ordnung das Verhalten realer physikalischer Systeme beschreiben können.
Schlussfolgerung
Gewöhnliche Differentialgleichungen zweiter Ordnung sind ein leistungsstarkes Werkzeug zur Modellierung und Analyse einer Vielzahl von Phänomenen. Das Verständnis ihrer grundlegenden Konzepte und Lösungsmethoden ist für viele Bereiche der Wissenschaft und des Ingenieurwesens unerlässlich. Während analytische Lösungen nicht immer möglich sind, bieten numerische Methoden eine praktikable Alternative zur Approximation der Lösungen. Die Wahl der geeigneten Methode hängt von der spezifischen Form der Gleichung und den gestellten Anfangs- oder Randbedingungen ab.